Arduino سيارة روبوت ميكانوم متعددة الاتجاهات مزودة بكاميرا ESP32 - مختبر الصناع ومجموعة المسابقات
على وشك النفاد!
577,00
AED
(شامل الضريبة)
الشحن والتسليم مجاناً
التزامات Trendyol
التسوق بأمان
الدفع الآمن
حماية الخصوصية
التسليم الآمن
مبالغ مستردة عن الشحنات المفقودة
كوبون تعويض في حال تأخر الشحن
إرجاع مجاني
إرجاع المشتريات بسهولة مجاناً خلال 15 يوماً.
الميزات البارزة:
ميزات سيارة روبوت ميكانوم متعددة الاتجاهات مزودة بكاميرا ESP32 - مختبر الصناع ومجموعة المسابقات من Arduino
محتويات العلبة
غير محدد
العمر
أكثر من 12 سنة
البطاريات مضمنة
لا
اللغة المستخدمة
اللغة الإنجليزية
تعمل بالبطارية
لا
خصائص أخرى
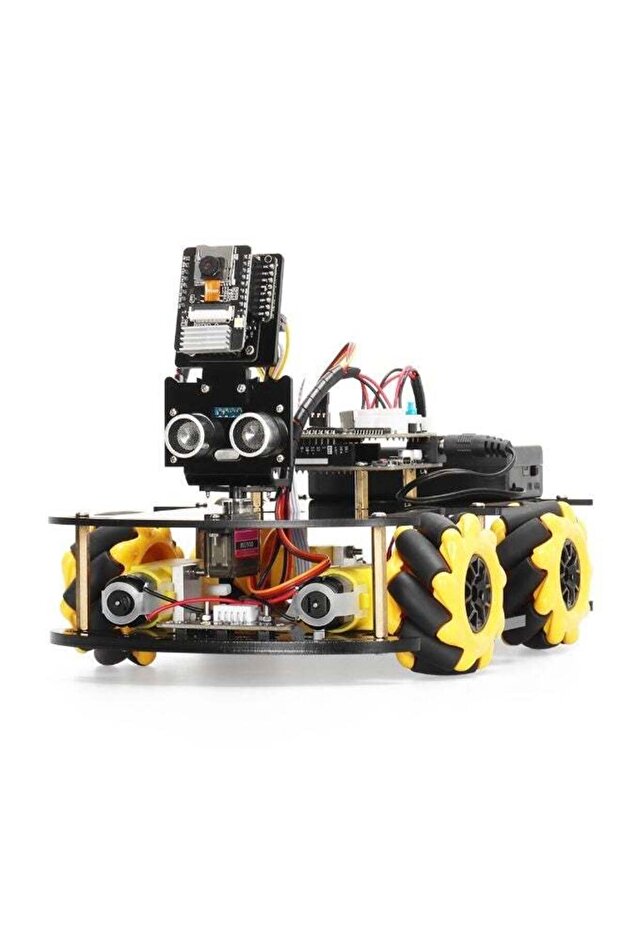
Compact "vision + robotics + IoT" educational platform featuring an ESP32-CAM that streams live video over Wi‑Fi for browser/app control and telemetry logging. Four-wheel Mecanum chassis provides omnidirectional motion with examples demonstrating PWM-to-speed mapping, PID speed/heading loops, and a decoupled pan-tilt camera. Sensing combines a 3-way IR line tracker and ultrasonic rangefinder for line following and obstacle avoidance; software templates for Arduino and MicroPython use non-blocking loops, schedulers, and serial/web streaming for logs and plots. Hardware includes thick plates, metal standoffs, rubber Mecanum rollers, solder-free terminals, tools, wiring maps, tuning sheets and troubleshooting checklists. Typical uses include maze routing, path tracking, mobile vision, AGV principles and classroom labs and competitions.
تفاصيل المنتج

ميزات سيارة روبوت ميكانوم متعددة الاتجاهات مزودة بكاميرا ESP32 - مختبر الصناع ومجموعة المسابقات من Arduino
محتويات العلبة
غير محدد
العمر
أكثر من 12 سنة
البطاريات مضمنة
لا
اللغة المستخدمة
اللغة الإنجليزية
تعمل بالبطارية
لا
خصائص أخرى
Compact "vision + robotics + IoT" educational platform featuring an ESP32-CAM that streams live video over Wi‑Fi for browser/app control and telemetry logging. Four-wheel Mecanum chassis provides omnidirectional motion with examples demonstrating PWM-to-speed mapping, PID speed/heading loops, and a decoupled pan-tilt camera. Sensing combines a 3-way IR line tracker and ultrasonic rangefinder for line following and obstacle avoidance; software templates for Arduino and MicroPython use non-blocking loops, schedulers, and serial/web streaming for logs and plots. Hardware includes thick plates, metal standoffs, rubber Mecanum rollers, solder-free terminals, tools, wiring maps, tuning sheets and troubleshooting checklists. Typical uses include maze routing, path tracking, mobile vision, AGV principles and classroom labs and competitions.